mBot sentsore eta konponenteak
mBot robotak ekartzen duen plaka aztertuz hasiko gara:
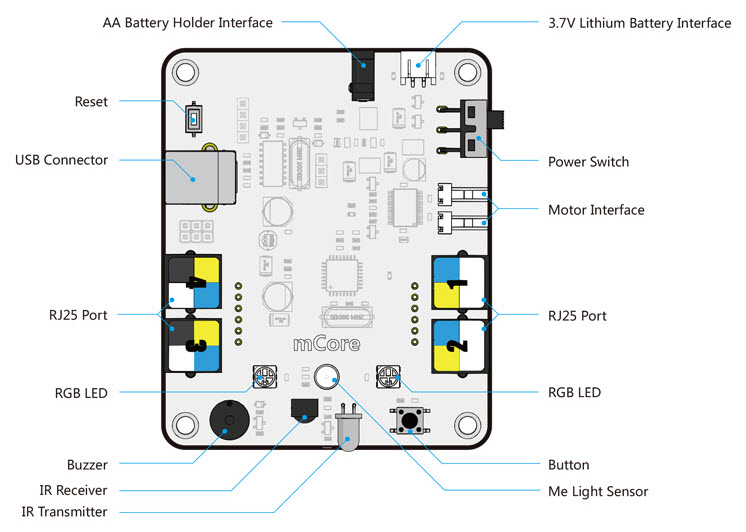
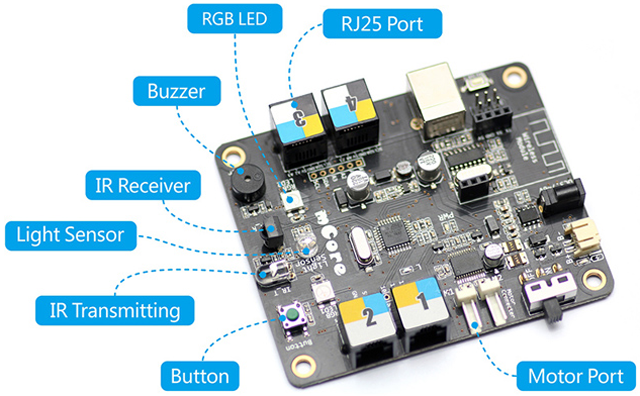
Hauek dira aipagarriak diren elementuak:
- AA Batery Holder Interface: Lau AA motako pilak entxufatzeko. Ezin da baterarekin batera erabili.
- 3.7V Lithium Battery Interface: Bateria entxufazteko. Ezin da pilekin batera erabili.
- Power Switch: Pizteko botoia
- Motor Interface: Motore sinpleak konektatzeko.
- RJ portuak: 4 portu daude. Programagarriak diren bestelako piezak konektatzeko dira.
- RGB LEDak: Bi LED ditu eta nahi den koloreekin pizteko aukera ematen dute.
- Button: Programagarria den botoi bat da. Hau sakatuz zer egingo den programazio bidez erabakitzen da.
- Me Light Sensor: Argi sensorea da. Inguruan dagoen argitasuna hartzen du.
- IR Receiver/Transmiter: Argi infragorriak erabiliz, aginduak bidali eta jaso ditzake. Kaxan datorren mandoa erabil dezakegu.
- Buzzer: Soinua egiteko balio du. Soinu hau nolakoa izango den ere programa daiteke.
- USB konektorea: USB kable bidez plaka ordenagailu batekin konektatzeko balio du. USB kablea erabiltzen denean, ez dira pila edo bateriak behar.
- Reset: Robota Hasierako egoeran utzeko.
Programa ditzagun
Atal bakoitzean erronkak proposatuko ditugu. Hauek garatu ditzakezu?
Argiak:
Mbot robotaren mCore plakak koloretako argiak ematen dituen bi LED ditu. Plaka ordenagailura konektatu (inongo muntaketarik gabe egin daiteke) eta saia zaitez ondorengoak egiten:
1.- Bi argiak kolore berdez piztu.
2.- Bi argiak kolore gorriz piztu, 5 segunduz mantendu. Ondoren ezkerreko argia berdea jarri eta eskuinekoa urdina.
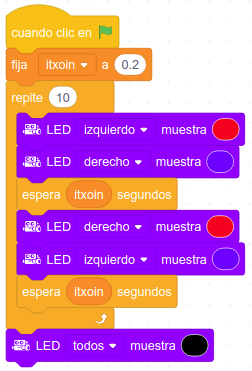
3.- Bi argiak anbulantzia sirena baten modura jarri etengabe. Urdina eta gorria erabili ditzakezu.
Buzzer:
Buzzer gailuari esker plaka nagusiak soinuak egin ditzake. Saia zaitez ondorengoak egiten:
1.- robotak edozien soinu egin dezala.
2.- Argien hirugarren ariketarekin jarraituz, anbulantzia sirenari soinua gehitu.

Motorrak
Robota mugitzen hasiko gara. Robota kotxe bezala muntatutako dugu eta mugitu behar denez, ordenagailutik aldendu beharko du. Tabletarekin ari bagara, ez dago arazorik, baino bestela, sortutako kodea mBot plakara igo beharko dugu. Nola igotzen da kodea plakara? Kaixo robota gidan ikus dezakezu.
Ondorengo ariketak egiten saiatu:
- Kotxea aurrera eta atzera mugitu. Norebide bakoitzean 2 segunduz mugitu.
- 10 segunduz, kotxea bueltak ematen utzi.
- Kotxea aurrera eraman, eskubira 90 gardu biratu eta aurrera jarraitu. (Kontuan izan zure kotxea 90 gradu biratzeko biratzen egon behar duen denbora, bateria eta duen marruskaduraren arabera, desberdina izango dela.)
- Obstakulu lasterketa. Horrelako zerbait egiten saiatu:
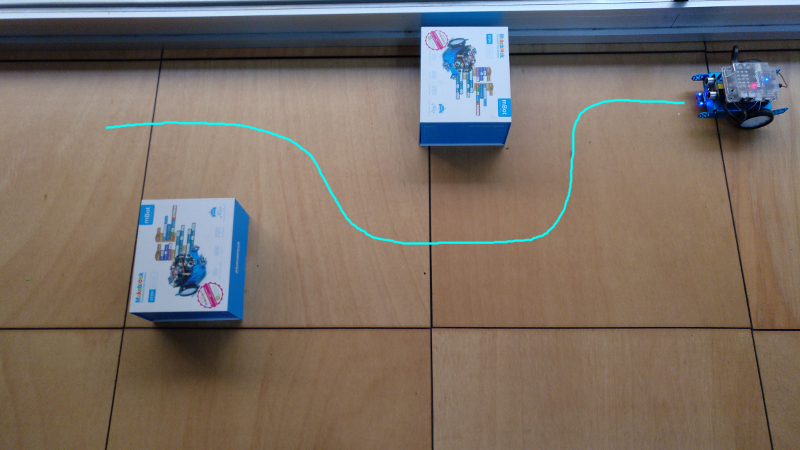
Erantzuna:
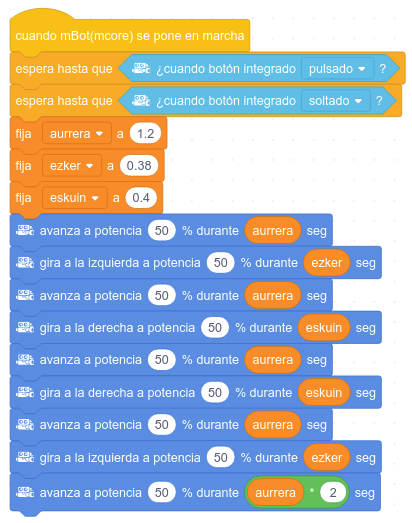
Kontuan izan robot guztiak ez direla berdinak. Pilen potentzia, egoera, egiten duen tenperatura, robotak duen maruskadura... Gauza askok eragiten dute robotaren mugimenduan, beraz, seguruenik zuk beste zenbaki batzuk erabili beharko dituzu. Zenbaki hauek aldagaietan jarriz, probak azkarrago egingo ditugu.
Tablet bat erabiltzea ere ideia ona izan daiteke. Bluetoth bidez, robota entsufatu eta desentsufatzen ibili gabe, proba gehiago egiteko aukera izango duzu.
Argi sensorea
Sensores blokeen atalan sartuko eta argi sensoeak egiten duen ikusiko dugu; Argitasun intentsidadea neurtu. Argi sensorea plaka nagusian dagoenez, ariketa hauek egiteko nahikoa da plaka bakarrik entxufatzea (Kotxe itsurarik gabe eta pilarik gabe ere funtzionatuko du). Kontuan izan aurreko ariketa egin baduzu, seguruenik Firmwarea eguneratu beharko duzula. Hondorengo ariketak egin:
- argitasuna izeneko aldagaia sortu.
- para siempre blokea erabiliz, begizta bat sortu eta begizta barruan, argitasuna aldagaiaren balioa ezarri. Emaitza pantailanm argitasunak duen balioa ikusiko dugu (1000 argi asko, eta 0 argirik ez badago).
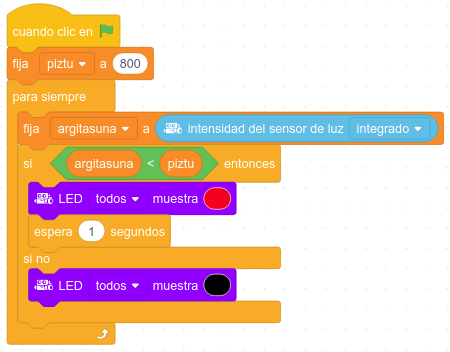
- Argitasun gutxi dagoenean (500etik behera adibidez), robotak argiak piztu ditzala. Kontuan izan, LED eta argi sentsoreak bata bestearen ondoan daudela, beraz, LED-ak piztean, sentsoreak argia dagoela erantzungo du. Egiten duguna ulergiarriagoa izateko, lehen sortu dugun argitasuna aldagaia erabil dezakegu.
Erantzuna:
IR mezuak
Izpi infragorriak mezuak bidaltzeko balio dute. Esan bezala, mBot robotaren mCore plakak mezu hauek jaso eta bidaltzeko sentsoreak ditu. Robotarekin batera datorren hurruneko kontrolak, izpi infragorriak bidaltzen ditu ere, beraz, hurruneko kontrola erabiliz, robotari mezuak bidaltzeko aukera dugu. Sesores barruan dauden blokeak erabiliko ditugu. Ondorengoa egiten saia gaitezen:
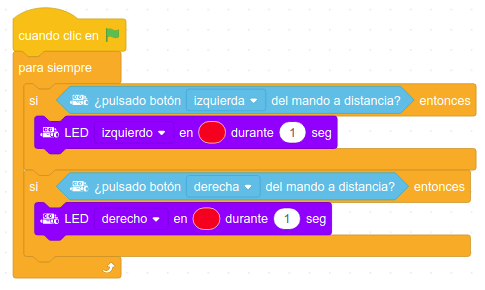
1. Hurruneko kontrolaren ezker gezia sakatzean, robotaren ezker argia piztuko dugu segundu batez. Eskuin gezia sakatzean berriz, eskuinb argia. Saiatu, ez baduzu lortzen hemen erantzuna:
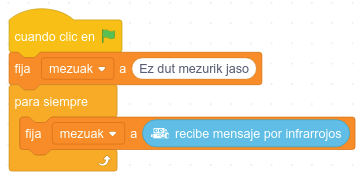
2. mBoten artean mezuak bidal ditzakegu ere. Demagun bi mBot ditugula. Bata bestearen parean jarriz, elkarren artean hitz egin dezaten saiatuko gara. Ezkerrekoak eskubikoari kaixo esaten ahaleginduko gara:
Mezua bidaltzen duen robotean (ezkerrekoan) horrelako zerbiat jar dezakegu:

Jasolean berriz horrelako zerbait izan dezake:
Elementu gehigarriak:
Ultrasoinu sensorea
Ultrasoinuen sentsore bat objektuen distantziak antzemateko maiztasun altuko uhinak erabiltzen dituen osagaia elektroniko bat da. Sentsore mota honek bi zati ditu: igorleak uhin seinalea bidaltzen du eta hartzaileak gertu dagoen objektu batean islatutako uhin seinalea jasotzen du. Bidalitako uhinak objektuen kontra talka egiten du eta bueltan etortzen da. Prozesuak igarotako denboraren arabera, objektua zein distantziara dagoen kalkulatzen da.
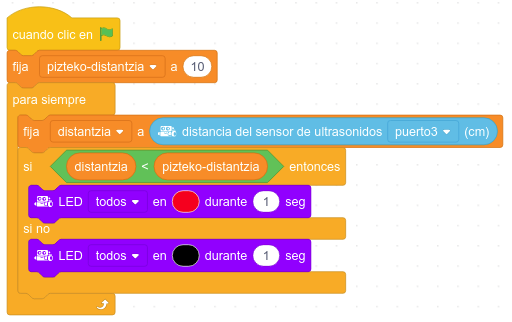
Ultraoinuen sentsorea plakaren 3. portura konektaut eta ondorengoak egiten saiatu:
- Aldagaiak erabiliz, sentsore distantziak ematen dituen balioak aztertu. Zein da ematen duen zenbaki txikiena? Eta handiena? (3zm eta 400zm artekoa izan beharko luke)
- Distantzia 10zm baino txikiagoa denean, LED argiak segundu batez piztu ditzala.
Lerro jarraitzailea

Lerro jarraitzelea ez da sensore bat, bata bestearen ondoan dauden bi baizik. Bakoitzak, argi infragorriak erabiliz, bere aurrean elementu zuri ala beltzak dauden detektatzen dute. Honako eskema ikusiaz, itzultzen dituen balioak ulertuko ditugu:
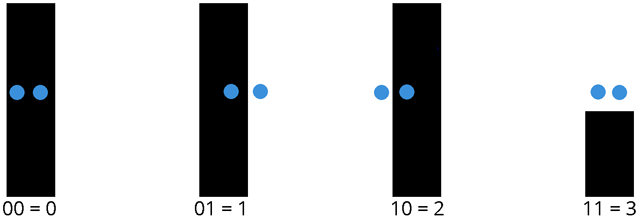
Izpi bakoitzak bere aurrean zerbait beltza ba ote duen aztertzen du. Beltza bada, 0 itzultzen du eta bestela 1, sistema bitarra erabiltzen da. Bi balioak batzen dira eta gero sistema hamartarrera pasatzen dira. Beraz:
- Bien aurrean beltza: 0
- Ezker beltz, eskuin zuri: 1
- Eskuin beltz, ezker zuri: 2
- Biak zuri: 3
Blokeen artean, sensore bakoitzak detektatzen duena beltza edo zuria den ere begiratu daiteke: 
Kontuan izan, sentsoreak distantzia oso konkretuan bakarrik funtzionatzen duela ongi. Gainera, argi txiki batzuk ere baditu eta hauek ikusiz, ongi dabilen edo ez ikus dezakegu.
Ondorengo ariketak egiten saiatu:
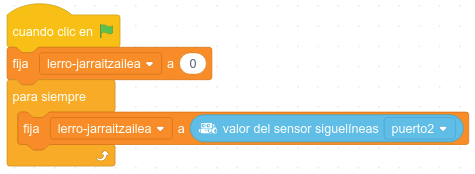
1. Lerro jarraitzaileak ematen dituen balioak pantailaratu.
2. Zinta beltza erabiliz, lurrean marra bat egingo dugu. Robotak, marra beltza jarraitu dezan programatuko dugu. Robotarekin datorren orria ere erabil dezakegu.
Ez duzu asmatzen nola? Hemendik has zaitezke:
- Robota kotxe moduan muntatuko dugu.
- Kotxeak, bi gurpil ditu eta gurpil bakoitzak bere motorea. Motore bakoitza zien potentziarekin mugitzen den definitu dezakegu. Beraz, aldagaiak erabiliz, balio lehenetsiz, biak potentzia berean mugitzeko jarriko dugu.
- Sentsoreak 0 ematen badugu, bi gurpiletan potentzia bera markatuko dugu
- Sentsoreak 1 itzultzen badu, eskuin motorrean potentzia gehiago jarriko dugu.
- Sentsoreak 2 itzultzen badu, ezker motorrean potentzia gehiago jarriko dugu.
- Sentsoreak 3 itzulten badu, marra galdu du.
Emaitza:
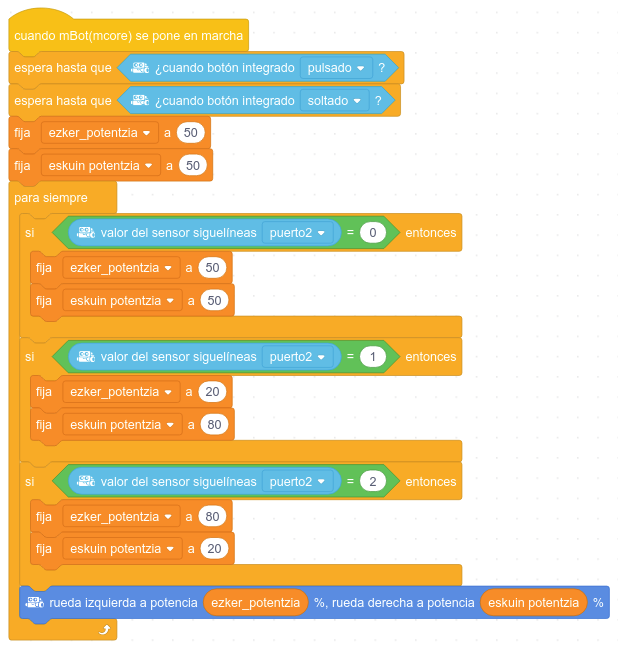
Oharrak: Lehen bi komandoak oso ongi etortzen dira robota piztu eta martxan hasi beharrean, plakak duen botoia sakatu eta askatu arte itxoiteko.
- Saioa hasi edo erregistratu komentarioak post-eatzeko