Mbot robotaren muntaketa
EHI,
|
Mbot robotaren oinarrizko itxura muntatuko dugu, hau da, kotxe bat izango balitz bezala. Ikasleak taldeetan banatu eta talde bakoitzari robotaren kaxa bana emango diogu. Pieza guztiak kaxatik atera eta irudian antzera aurkeztuko ditugu. Pieza guztiak ongi banatzeak muntaketan asko lagunduko du. Ondoren, liburuxkan dauden pausuak jarraituko ditugu. |
 |
|
Materiala |
|---|
|
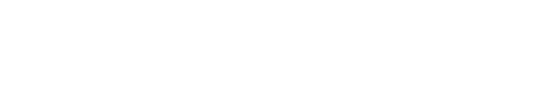
Muntaketarako gidako pausu garrantzitsuenak:

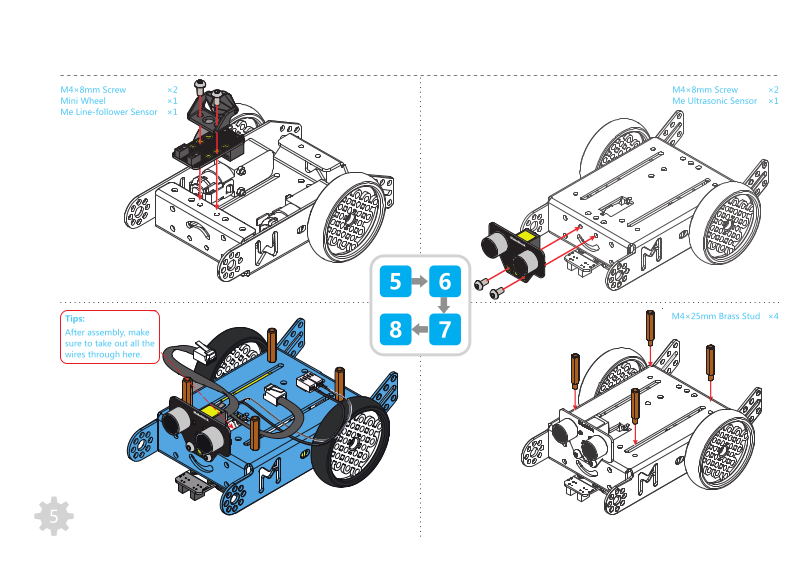
Zenbait irudi saltatu egin ditugu gure kasuan behar ez ditugulako. Plakak bluetooth motxilekin muntatuak ditugu eta ez ditugu zabalduko. Baterien ordez, pilak erabiltzen ditugu.
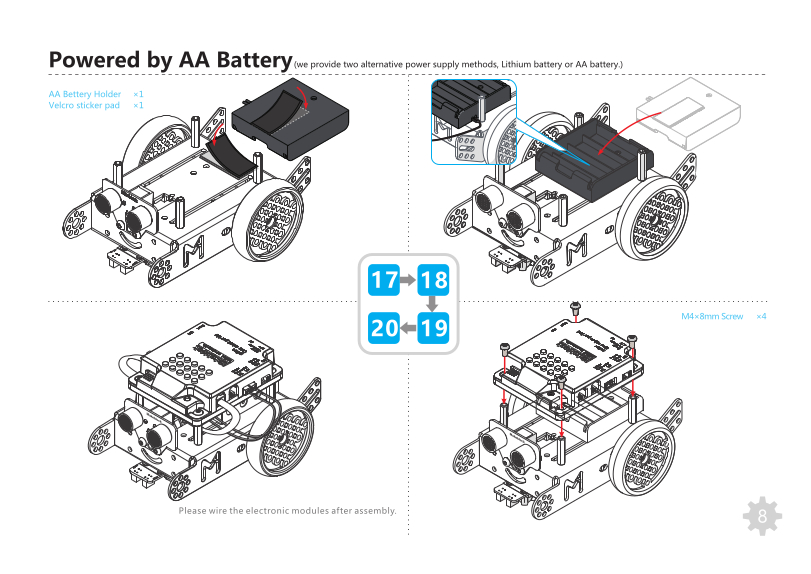
Ziurtatu konexioak horrela egin direla:
- Ezker motorra M1 konektorean.
- Eskuin motorra M2 konektorean.
- Marrak jarraitzeko sentsorea (line folower sensor), RJ25eko 2. portuan (Ezker).
- Ultrasoinuen sentsorea (Ultrasonic sensor), RJ25eko 3. portuan (Eskuin).
- Pilak, atzeko konektorean.
Oharrak:
- OSO GARRANTZITSUA: Robota mahai gainean utzi behar bada, gurpilak goraka utzi. Nahi gabe piztua utz dezakegu eta erori daiteke.
- Youtuben bideo asko daude muntaketa nola egiten den ikusteko. Hemen bat: https://www.youtube.com/watch?v=N2W3kGNmCQE
- mbot robota balio lehenetsiz zenbat programa aurreinstalatuak ditu. Robota ongi muntatu dela probatzeko, piztu eta nola funtzionatzen duen ikus daiteke.
- Saioa hasi edo erregistratu komentarioak post-eatzeko